
Перемещение, скорость и ускорение
Перемещение описывает положение (позицию) объекта. Скорость показывает, насколько быстро объект меняет свое положение во времени, а ускорение – насколько быстро меняется скорость. На рисунке 1-5 изображены колебания маятника, наблюдаемые со стороны датчика перемещения, а также диаграммы перемещения, скорости и ускорения. Перемещения маятника измеряют относительно вертикали (положение равновесия).
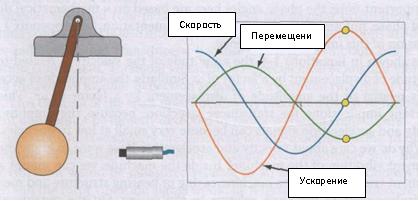
Рисунок 1-5. Колебания маятника. Кривые перемещения (зеленая), скорости (синяя) и ускорения (оранжевая), показаны в зависимости от времени. Желтые точки представляют собой уровни сигнала для положения маятника, изображенного на рисунке.
Имейте в виду, что пик скорости наступает в момент прохождения маятником вертикали при движении в сторону датчика. Когда маятник достигает крайнего положения и оказывается ближе всего к датчику (максимальное положительное значение на графике перемещения), скорость в этот момент равна нулю. Когда маятник снова проходит через вертикаль, скорость достигает своего максимального отрицательного значения. При достижении маятником крайней противоположной точки перемещение достигает своего минимума, а скорость снова равна нулю.
Так как маятник приводится в движение силой гравитации, то ускорение равно нулю в момент прохождения маятника через вертикаль. По мере того, как маятник перемещается к положительному пику рядом с датчиком, сила гравитации действует таким образом, что скорость уменьшается. Следовательно, ускорение становится отрицательным и достигает своего максимально отрицательного значения (минимума на графике) тогда, когда перемещение максимально. Далее маятник начинает движение в обратную сторону от датчика, отрицательное ускорение уменьшается, стремясь к нулю.
Когда маятник достигает противоположной крайней точки, сила гравитации старается остановить его и направить обратно к датчику. В этой точке ускорение достигает максимального положительного значения (см. график).
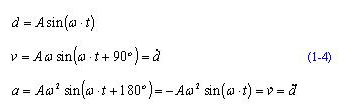
Только для моночастотных сигналов (синусоид), таких как изображены на рисунке, существует простая математическая зависимость между перемещением, скоростью и ускорением:
где ![]() - это перемещение,
- это перемещение, ![]() - скорость,
- скорость, ![]() - ускорение,
- ускорение, ![]() - амплитуда перемещения (максимально возможное перемещение, которое выражается, как пик, п-п или СКЗ), а
- амплитуда перемещения (максимально возможное перемещение, которое выражается, как пик, п-п или СКЗ), а ![]() - частота вибрации в рад/сек. Числа 90 град. и 180 град. представляют собой относительную фазу между сигналами. Точки над буквами обозначают первую и вторую производную от времени (
- частота вибрации в рад/сек. Числа 90 град. и 180 град. представляют собой относительную фазу между сигналами. Точки над буквами обозначают первую и вторую производную от времени (![]() и
и ![]() ).
).
В уравнениях 1-4 скорость опережает перемещение на 90 градусов; т.е., она достигает своего максимума на четверть цикла (или на 90 град.) раньше (знак «+») максимума перемещения. На рисунке 1-5 изображены графики уравнений 1-4; обратите внимание, что максимум скорости наступает тогда, когда перемещение равно нулю и начинает возрастать.
Ускорение опережает перемещение на 180 градусов, а скорость – на 180 град. минус 90 град., т.е. на 90 градусов. На графике максимум ускорения наступает тогда, когда скорость равна нулю и начинает возрастать, перемещение и ускорение изменяются в противоположных направлениях.
Важное замечание: углы фаз здесь основаны на математическом определении фазы, а не на данных с прибора.
Из уравнений 1-4 следует, что амплитуда скорости связана с амплитудой перемещения через коэффициент «омега». Аналогично – амплитуда ускорения связана с амплитудой перемещения через коэффициент . Это имеет важные последствия для выбора датчика, т.к. на низких частотах амплитуда сигналов скорости и ускорения может стать очень низкой.
Зачем нам скорость и ускорение, если мы хотим узнать виброперемещение агрегата? Мы можем установить датчик перемещения изнутри агрегата – в корпусе или подшипнике – и замерить перемещение вала относительно корпуса. Измерить же перемещение корпуса агрегата датчиком, установленным на корпусе, невозможно. Поэтому замерять перемещение снаружи агрегата надо относительно внешней опорной точки. По этой причине для замеров вибрации корпуса применяют датчики скорости и ускорения.
Эти датчики имеют свою внутреннюю инерциальную систему отсчета, и их можно устанавливать непосредственно на корпус агрегата для снятия данных вибрации корпуса.
Так как эти датчики применяют для мониторинга агрегата, важно понимать зависимость амплитуды и фазы для сигналов перемещения, скорости и ускорения.
Автор: Donald E. Bently "Fundamentals of Rotating Machinery Diagnostics"
Перевод: Виктор и Алексей Рожковы (rotkiv)
- Войдите на сайт для отправки комментариев
